To keep each robot from running into each other and off the canvas we are using distance sensors. The code for it is actually pretty simple and yields this outcome:


Since this pretty much works, I then add in my code for the pattern and make it flash red when the sensor is set off. This is the result:


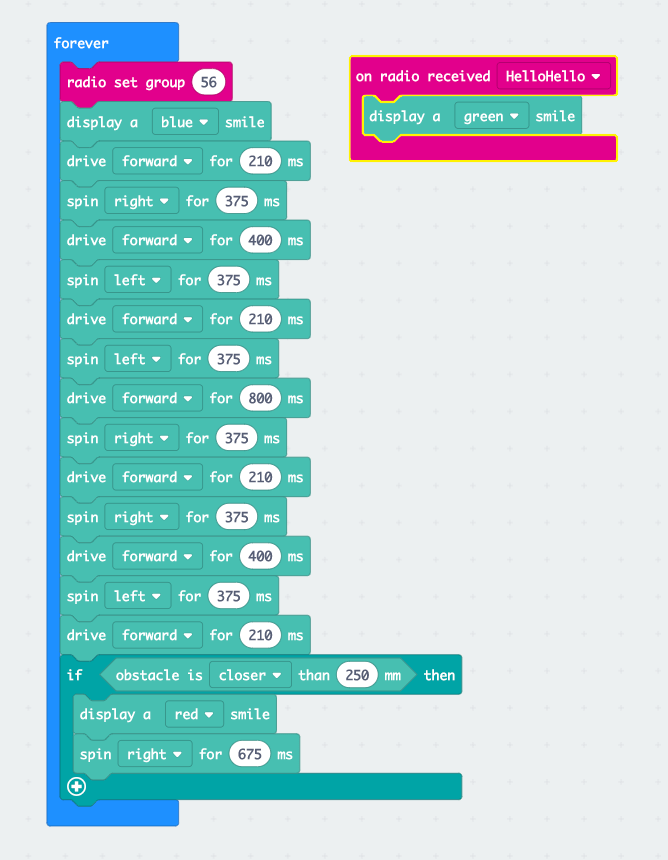
Now to add in the radio. For the robot I set the channel that the radio is going over and I determined what would happen if the remote were to send “HelloHello” over channel 56.
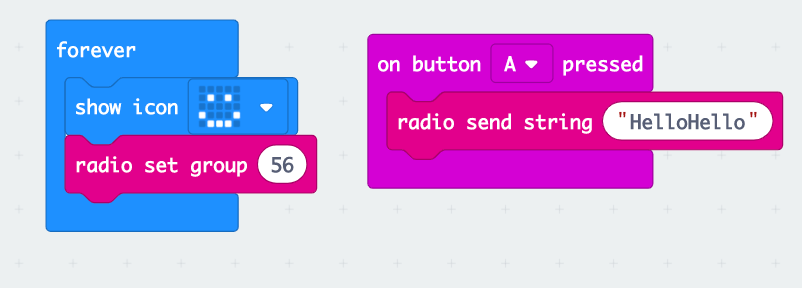
As for the code on the remote. I set the channel to 56 and made it send the string “HelloHello” when button A is pressed.
Here are the results when testing out the radio part of the code.
We plan to use the radio to control the direction of the robot in a more creative way than just pressing a button.
Well, that’s it for now!
-Arva Syed
