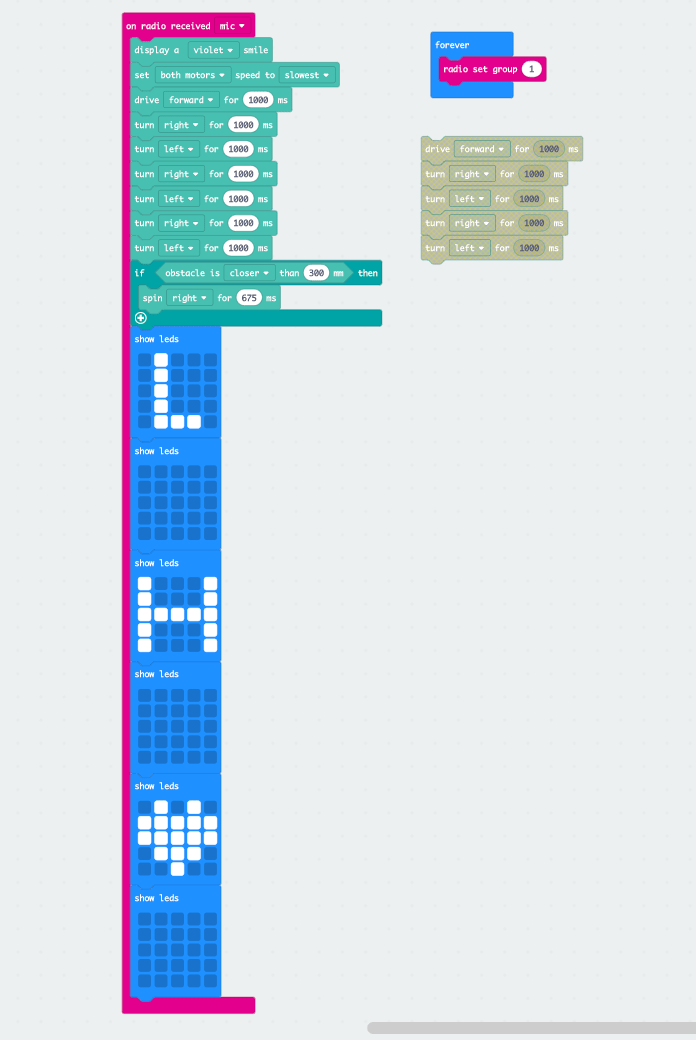
In today’s meeting, me and my teammate try to use radio function to control our gigglebot to move. At the last Friday, Celeste, and Dureti try to use the code that showing below to try to make the giggle bot able to avoid object and change direction. In this meeting, I found out if we use the function “if the obstacle is closer than 100mm”, is not sensitive enough. so I change the function to 300 mm, it became much sensitive than before. 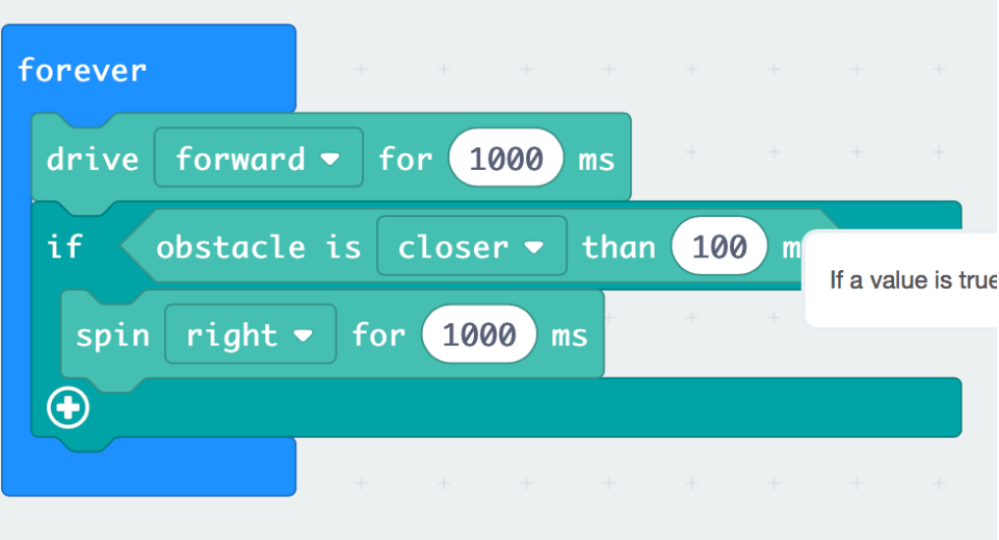
and then I figure out the final pattern that I want to is a wave and our group figures out we want to do a rainbow smile pattern on the giggle bot. It took us a long time to figure out the sensitivity of the giggle-bot, and then we found out it will be better if we take off the back sensor down, the robot can be more sensitive than before they have 2 senor on the robot. It is interesting when you see every time you make something new and able to make it happen on the robot.