After many iterations of our codes and trial and errors today we’ve all reached a point of satisfaction for our artbots. All though there is some glitches like with the shaking action which takes some time to work (if it ends up working). I ended up adding the light sensor functionality after Ben’s suggestion the other day so my gigglebot had some sort of “creative” aspect to it.
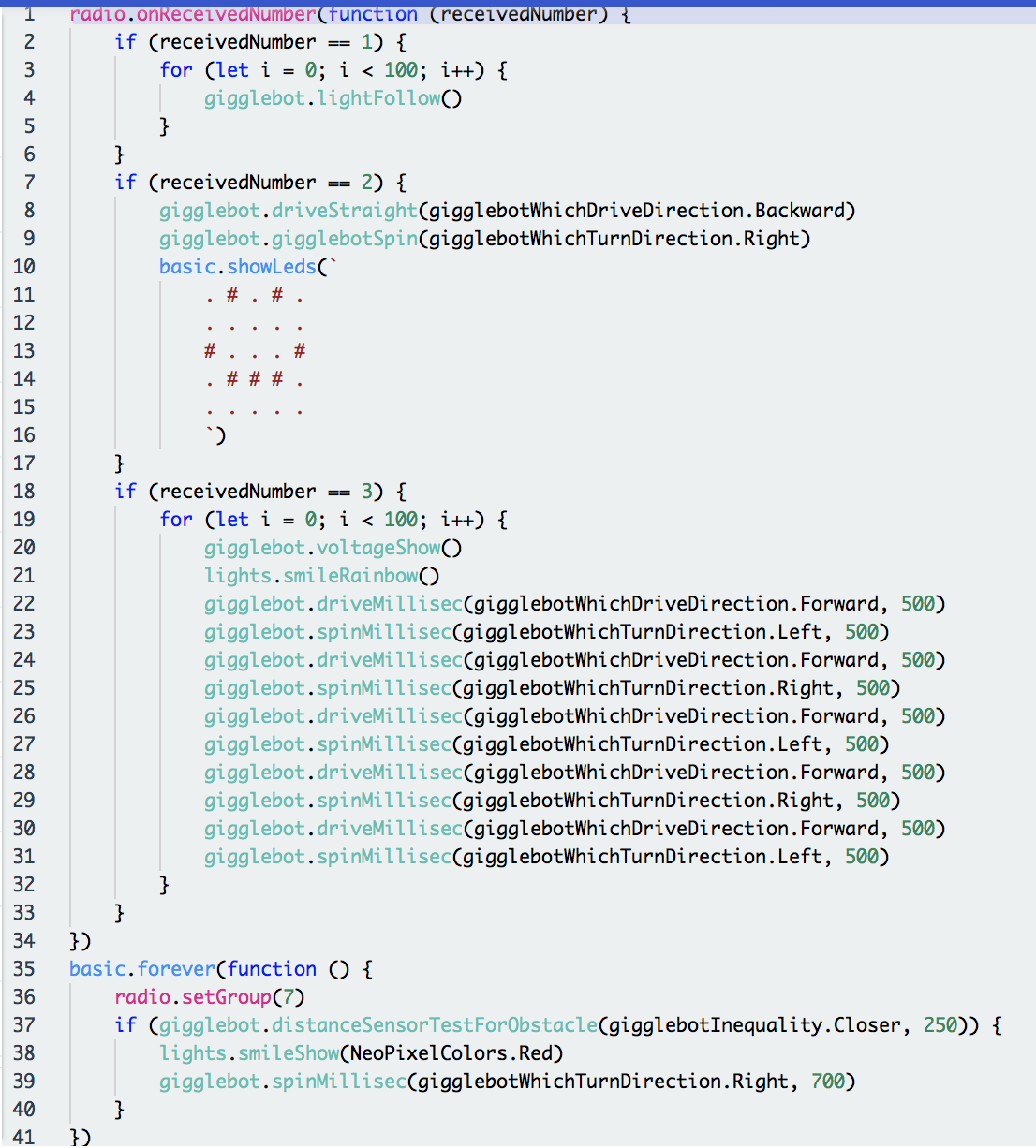
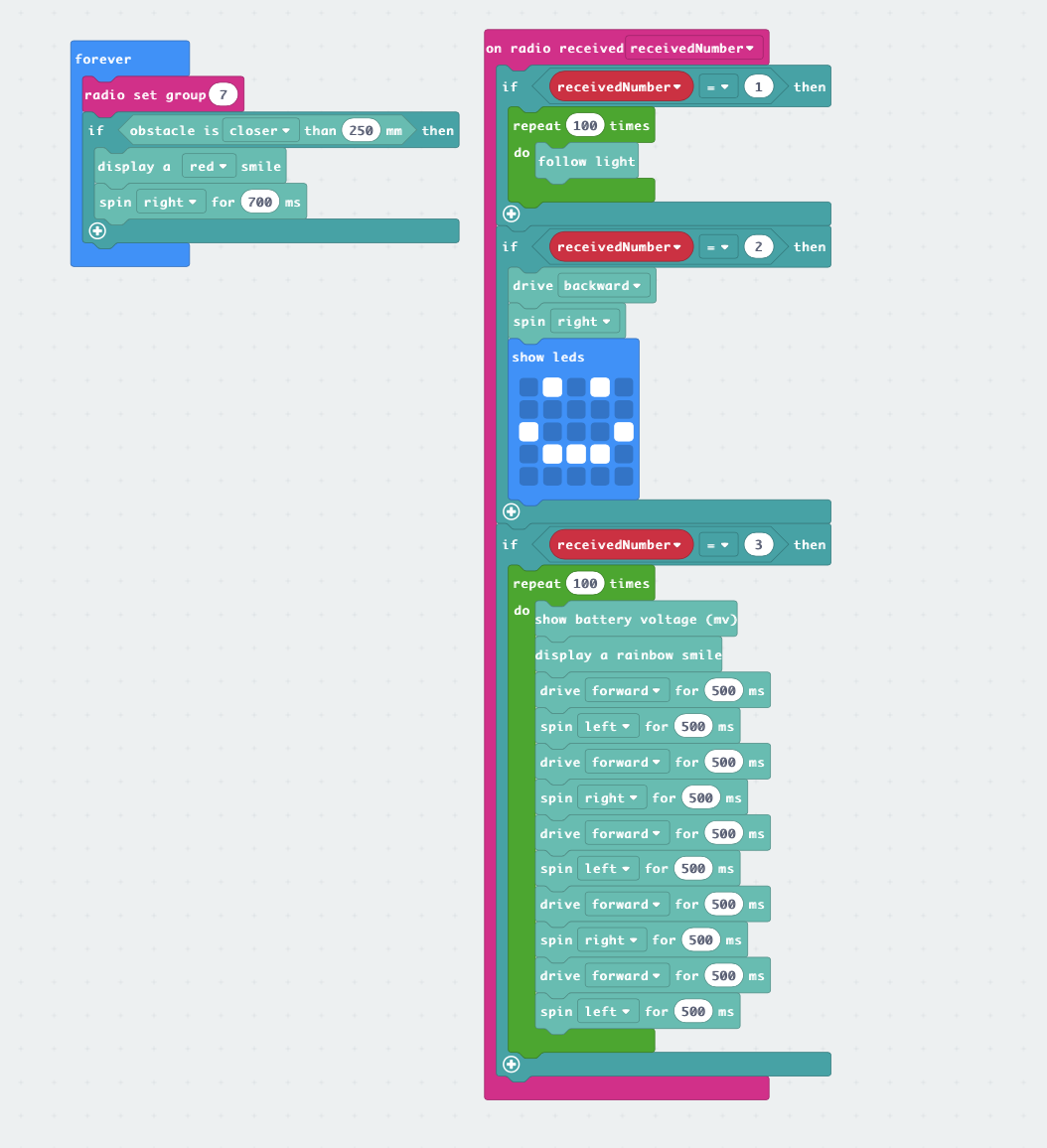
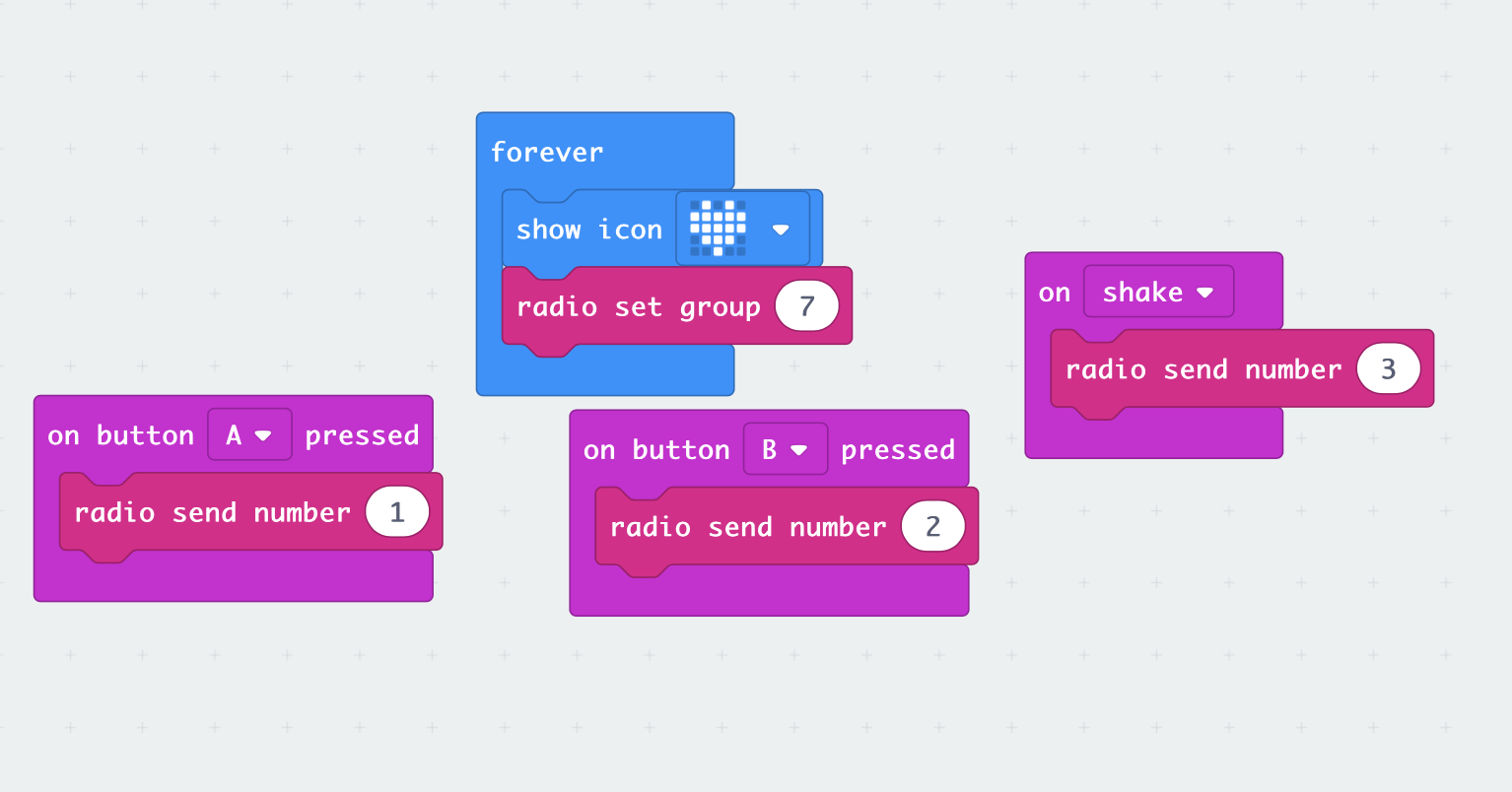
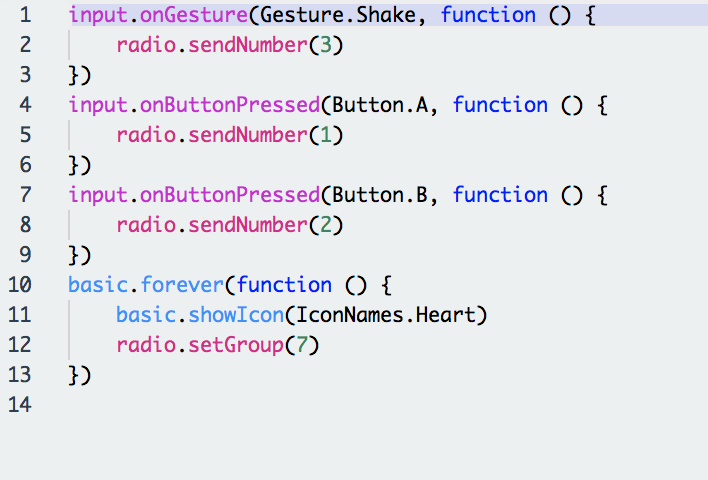
So using a second micro.bit as a radio controller I had A set up on the controller to send the number 1 to my micro.bit on the gigglebot which initiated the “follow the light function”. B was sending the number 2 via the radio controller to the gigglebot controller which was the “backing up” function where if it was stuck I programmed it to get out of stick situations. When the radio controller shakes it send the signal to start my pattern from the last code I have under 3. In the forever we have our distance sensor and made it more sensitive because at 300 mm it was detecting everything as “close” and wouldn’t do any of the other things we wanted it to do.